Walk-e is a vision of accessible human-robot collaboration. It is dedicated to carry payloads and walk everywhere humans go. With Ugo Roux, we decided to create a walking physical system to adapt the machine to the human rhythm.
Walk-e project is huge and faces a lot of challenges.
Project started with a successful crowdfunding campaign, which allowed us to setup the first prototype. Since, we keep working on prototyping and thinking about the value creation opportunities.
First, a quick survey …in french, of course !
We asked the Robot Maker community (french robotics forum) their opinion about robotics in general and more specifically about humanoid and biped platforms.
Would you like to take part in this survey ? Results will be published here in return.
The Prototyping platform
We work on the design of a very accessible version of biped robot, to answer our own questions and allow other researchers and makers around the world to start their own project based on Walk-e.
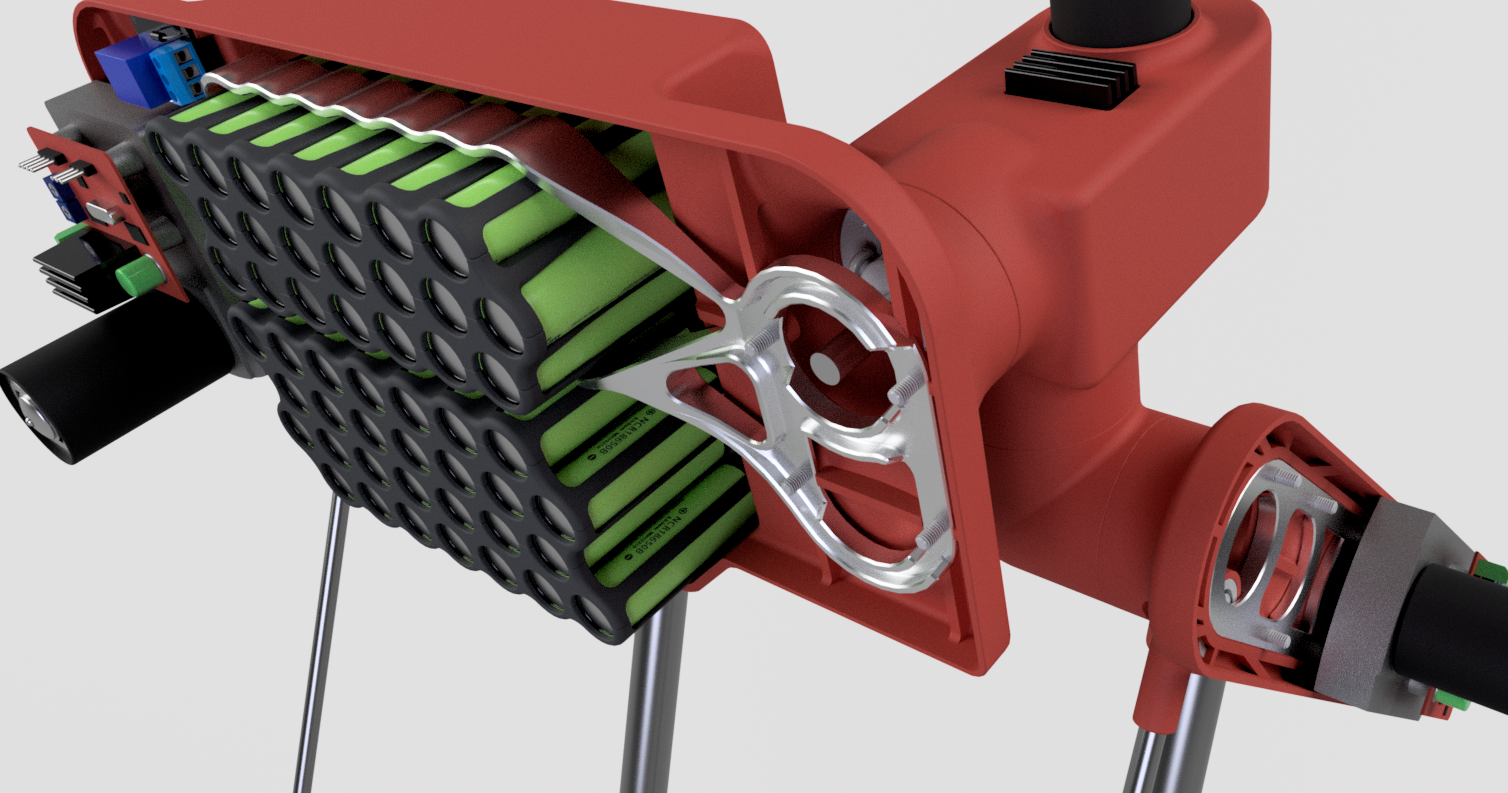
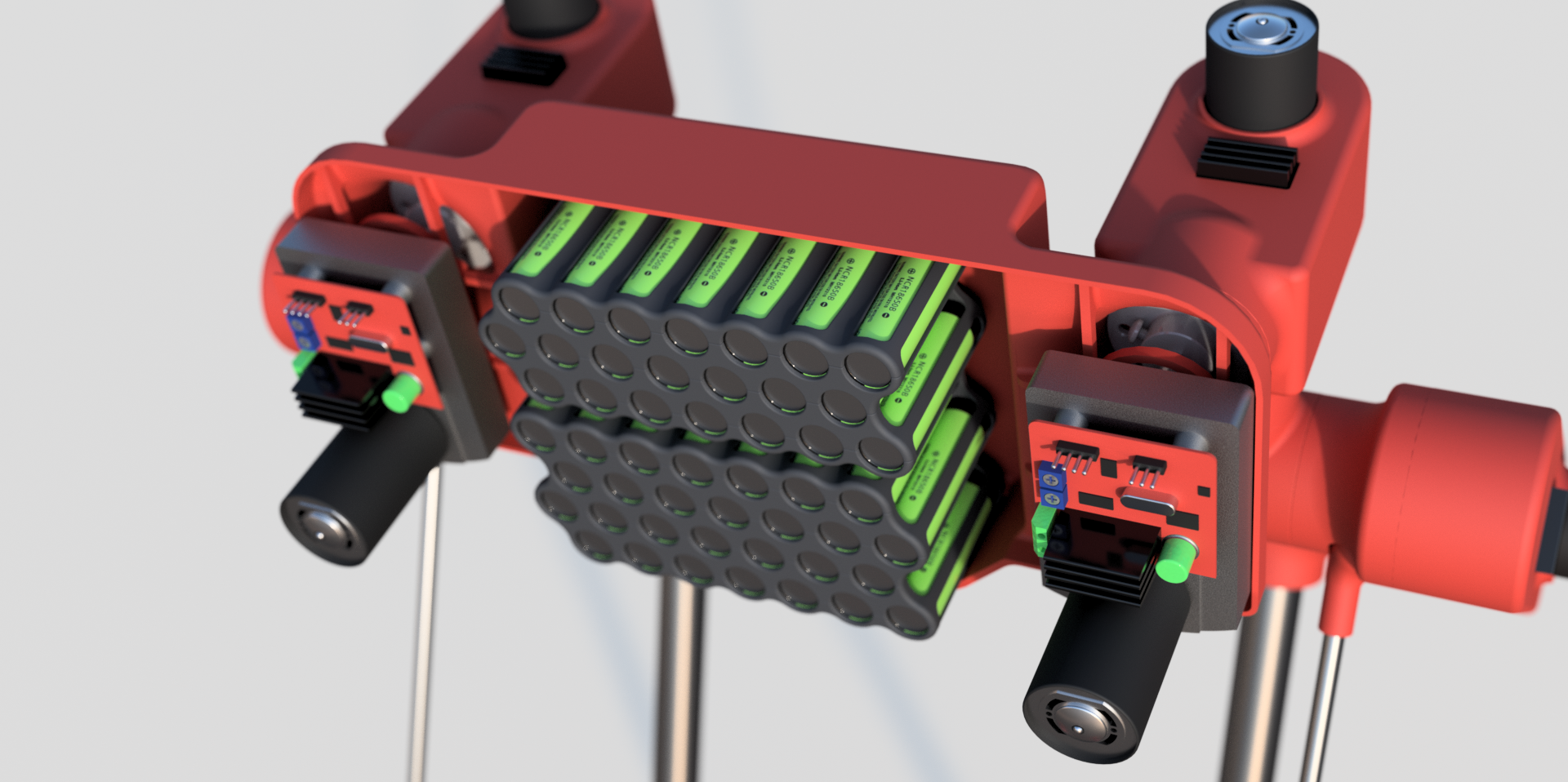
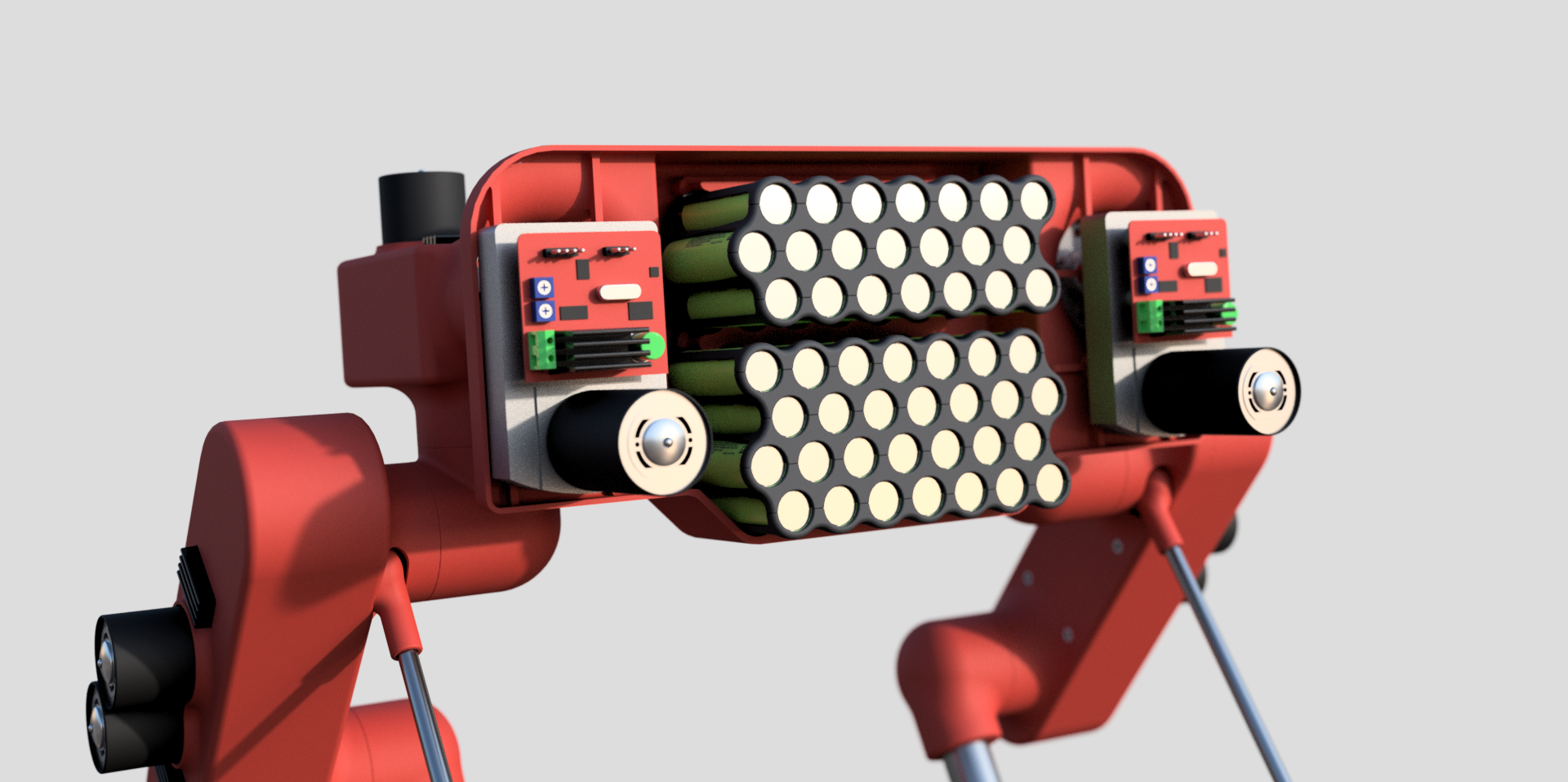
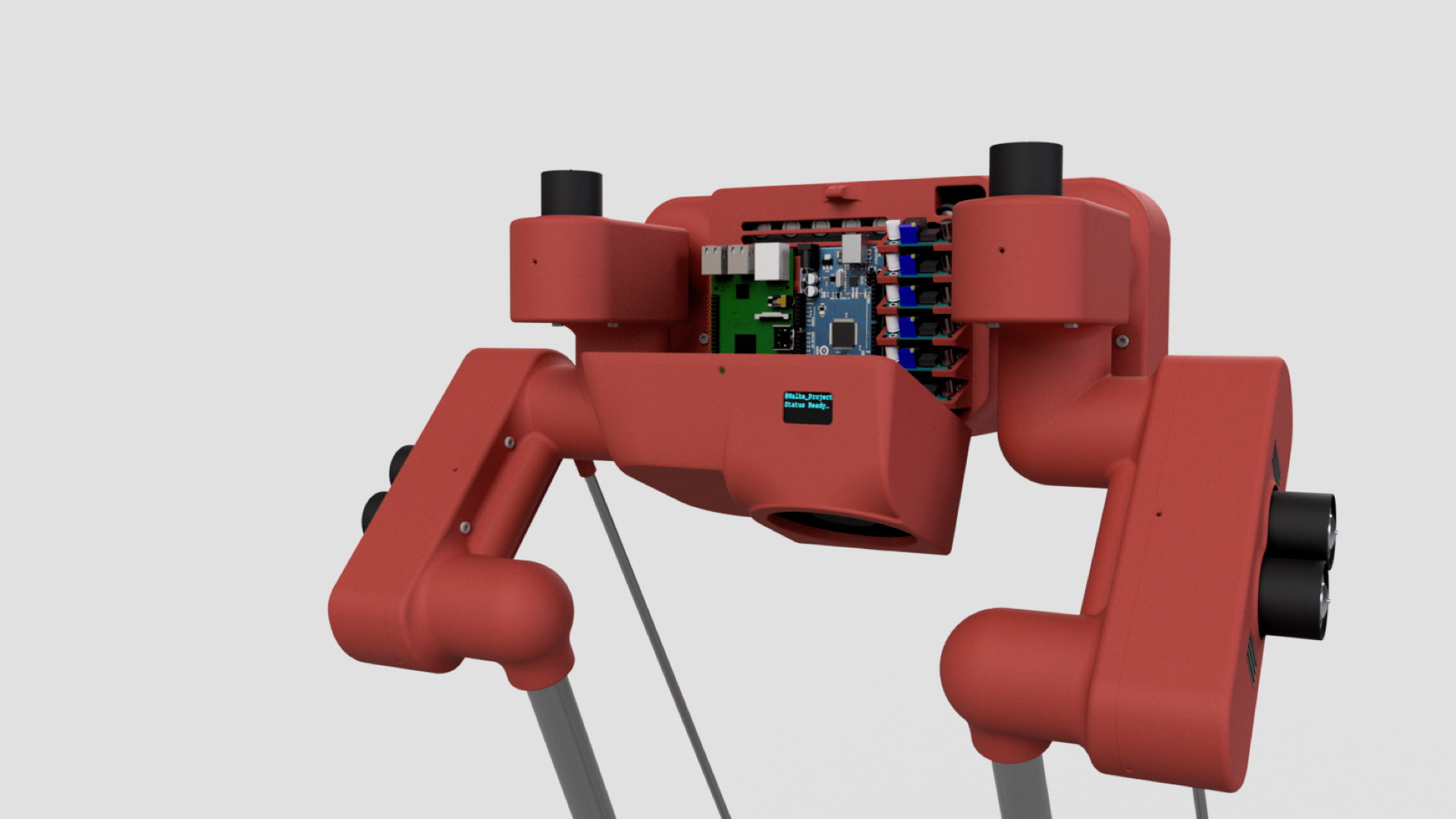
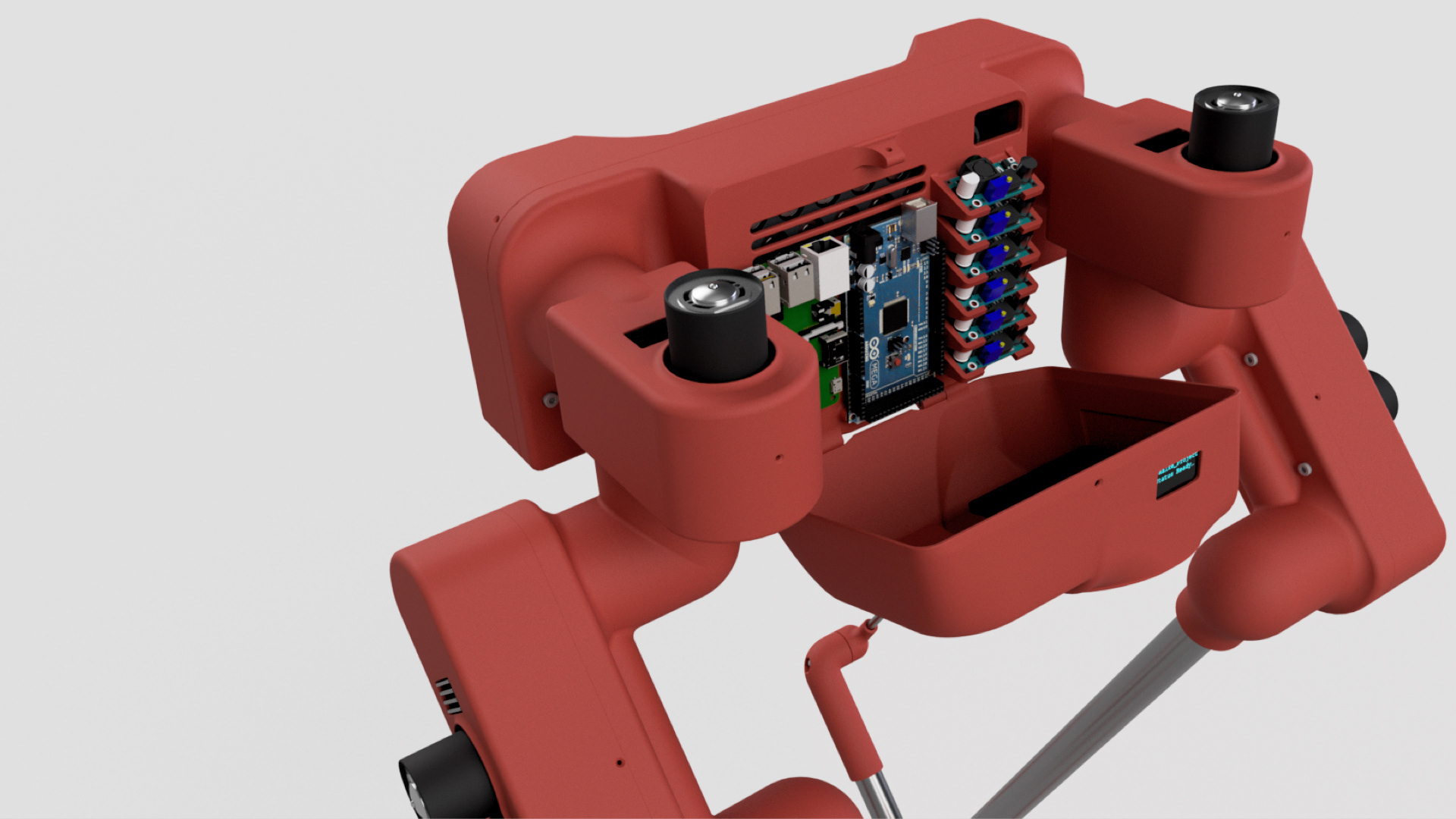
Printing Parts



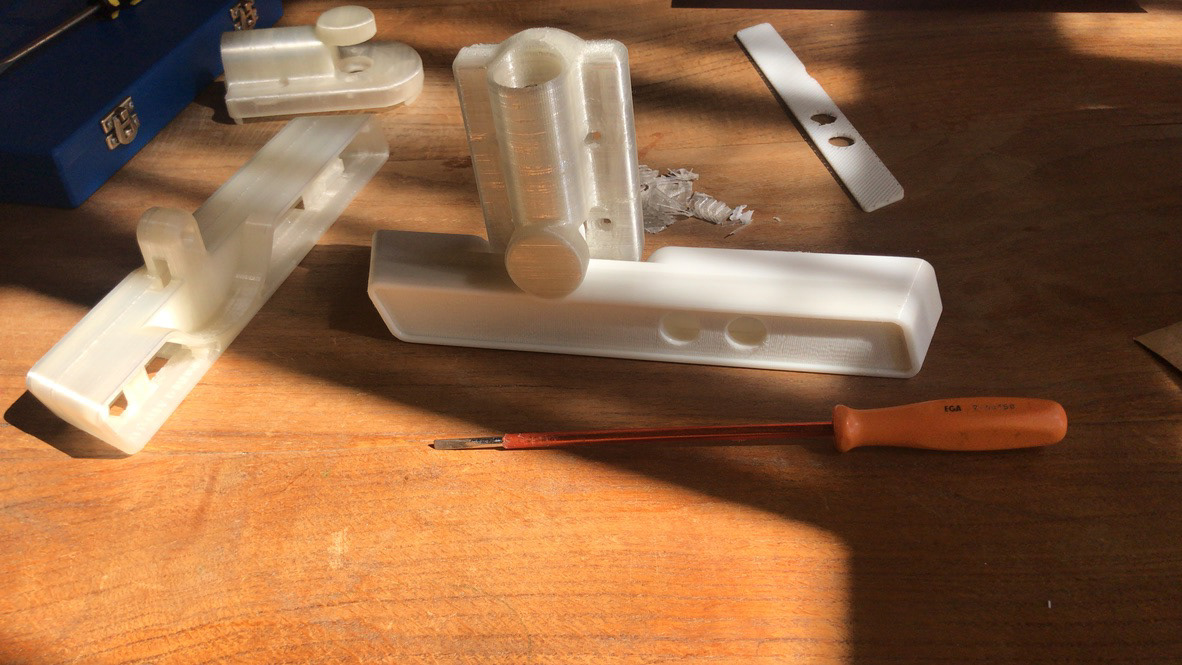
After we fully prepared model in 3D to match our prototyping capacities, we now work on the artificial intelligence part, to train the model, in order to get it walking.
Artificial Intelligence
Training Walk-e is a tremendous challenge. Our value is to promote robotics and make it accessible for the largest number.
As we will promote the prototyping platform, we also want to facilitate access to Deep Learning simulations.
However we do can not be more precise about the release of the result on this aspect.
End user value and communication
Promotion is very important to get support, and share the Walk-e's vision to embed new ideas from the public. Feedbacks are key for us.
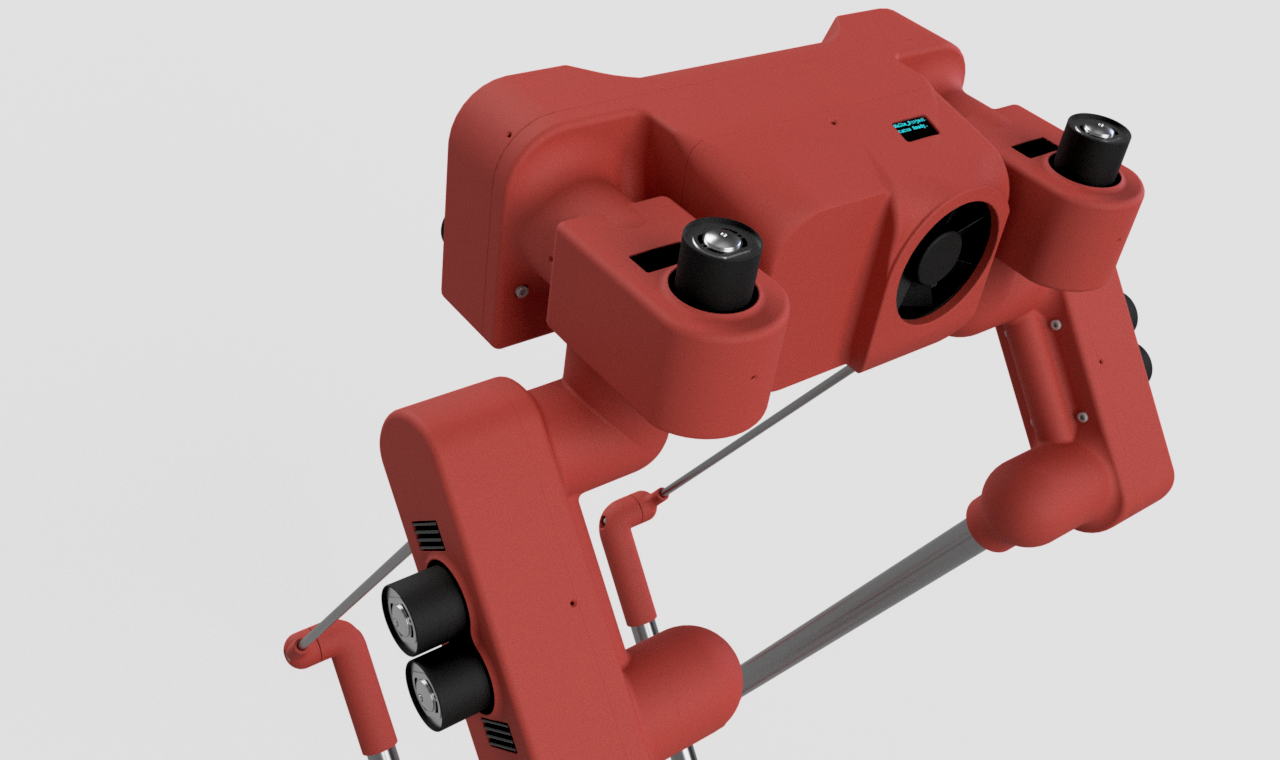
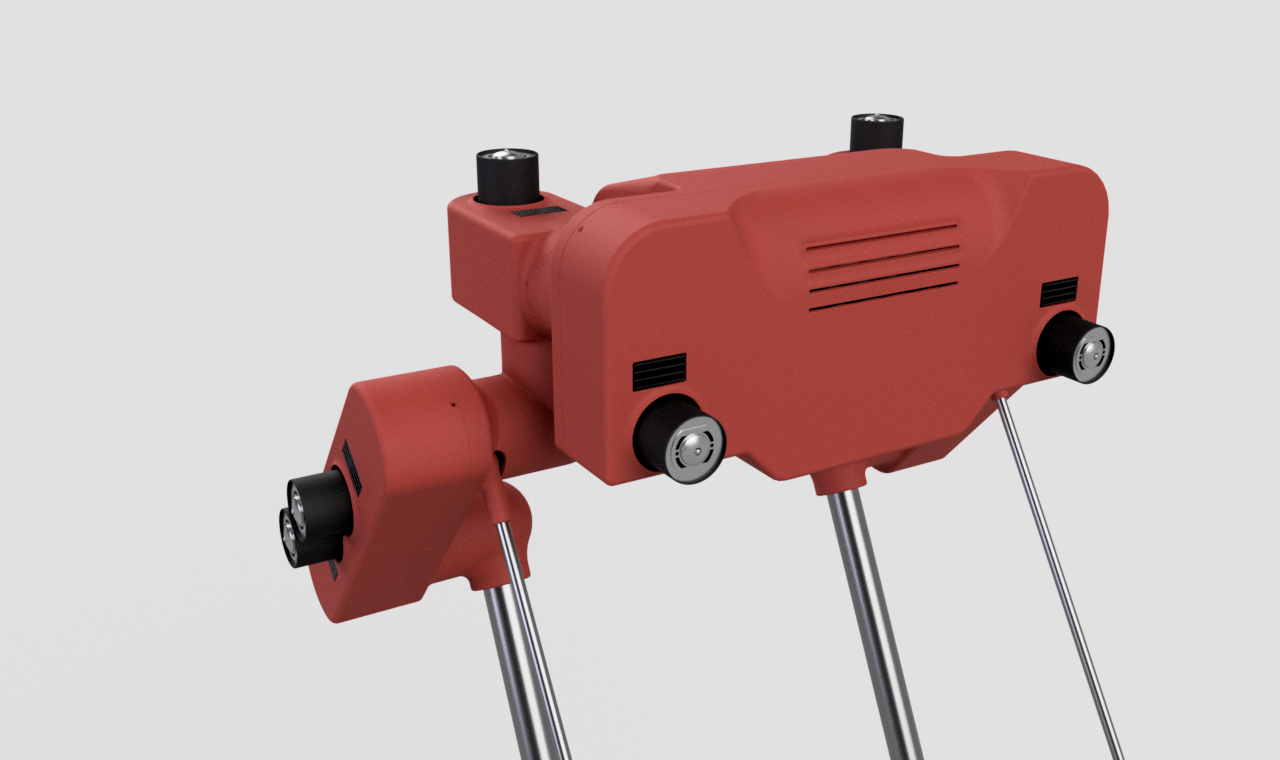
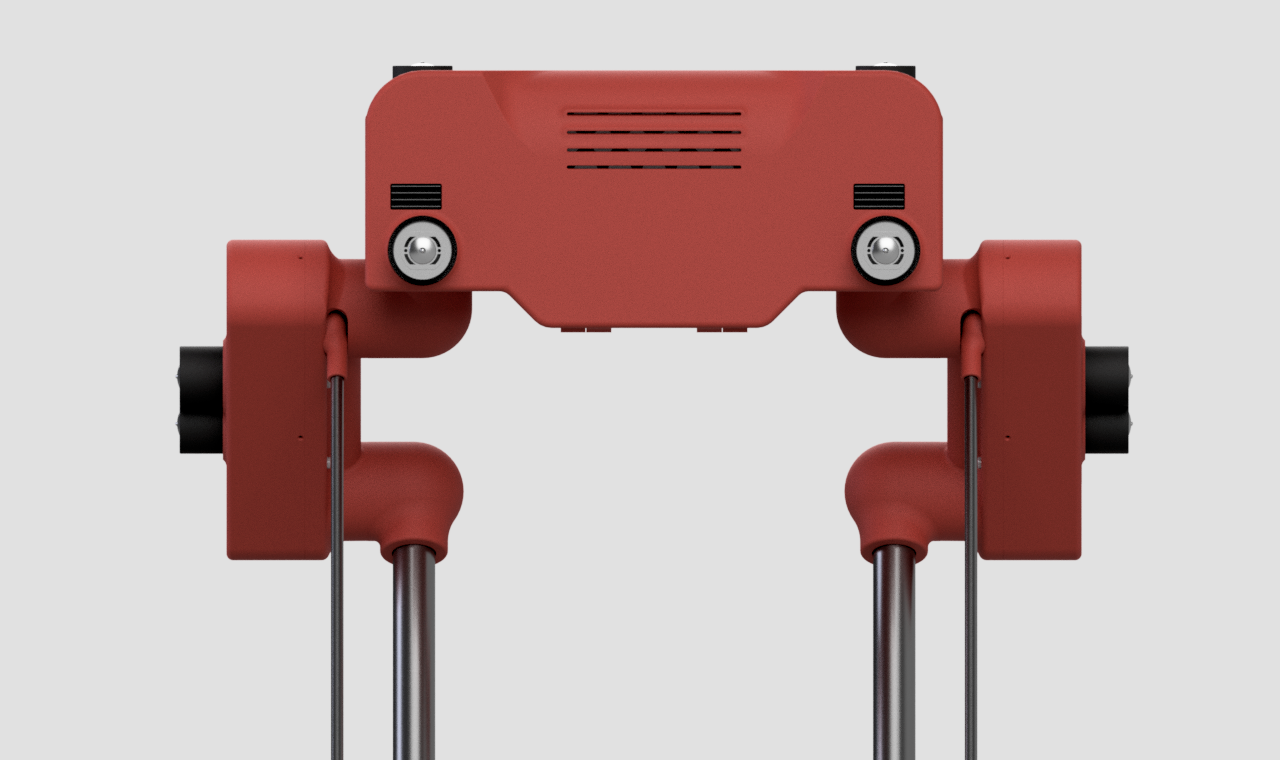
Below are several animations or still renderings, we published to involve public and share the final expected result, based on the prototyping platform.
Of course, a specific design process will take place to make it real.

The key feature of Walk-e is modularity : two Walk-e platforms can be combined to increase carrying payload capacity. It is a new robot without redesigning a complete new system. Our ambition with Ugo Roux, is to provide an autonomous platform capable of robot-robot collaboration when necessary, in order to cover all the land uses for a fraction of today robotics cost.
Walk-e civilian protection version
This short clip, dedicated for smartphone display allows us to communicate quickly the concept and promote the Twitter account
Walk-e first steps animation
Contact
Thank you!